SuperDex and Tele-Op
Avsr SuperDex combines proprietary teleoperation techniques, AI models for learning from human demonstrations and reinforcement learning trained on simulation to enable robots to rapidly learn fine dexterous tasks.
Our focus is on developing methods to collect high-fidelity real-world data with minimal effort and training systems to perform well with increasingly less amount of data. Our system allows for effectively learning the tasks performed during the human demonstrations by recording the trajectories, visual and tactile information, and task description in natural language. It allows the AI models to generalize over unseen tasks and learning to handle a variety of objects with different shapes, size and rigidity.
AI for Real‑World Precision & Fine Manipulation
In industrial settings, one mistake can cost millions. While video‑ and simulation‑trained models make an excellent pre‑training base, true safety and accuracy demand real‑world data. We prioritize collecting high‑fidelity demonstrations directly from production environments using our tele-op (see below), ensuring our robots learn the nuances of sensitive equipment and delicate assemblies.
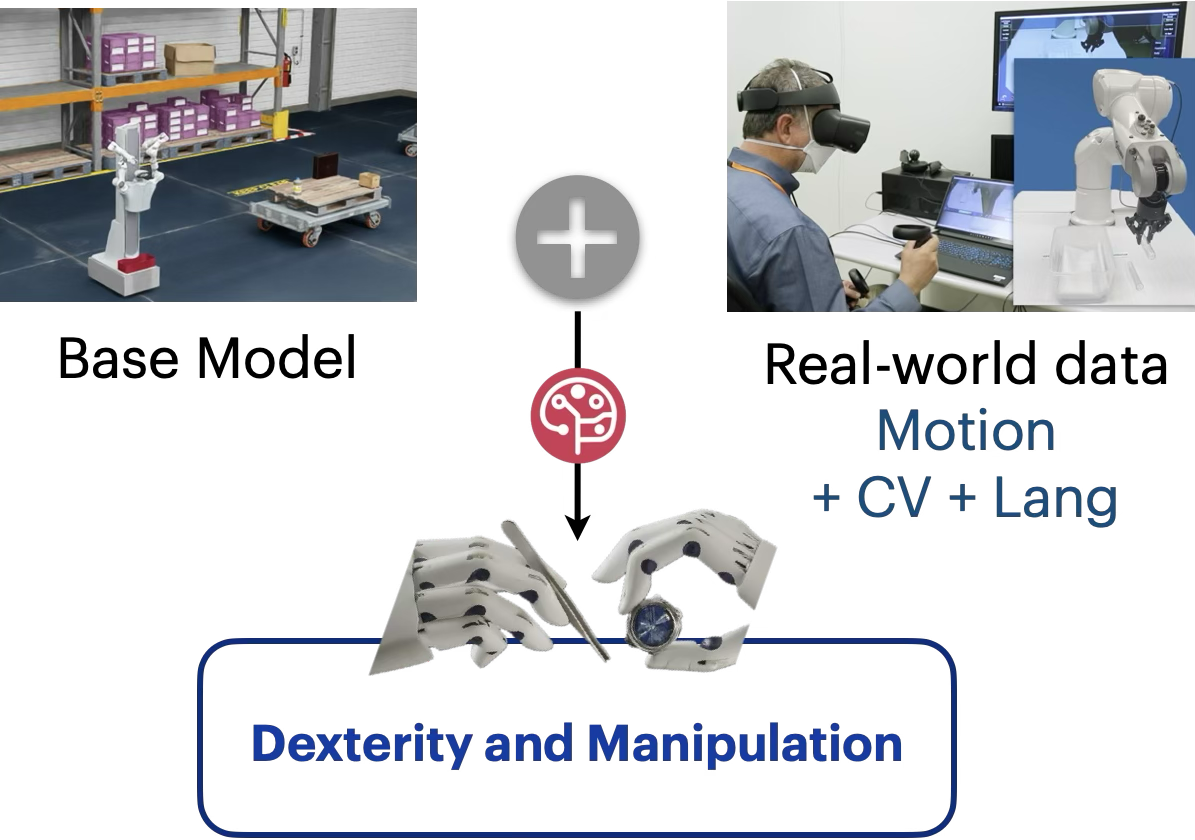
- Dexterity via Learning from Demonstration — Leveraging our multi‑layered cognitive stack, we integrate state‑of‑the‑art dexterity models, such as VLA and diffusion‑policy networks, directly into the low‑level planner. Our patented tele‑operation system captures human motions at high-precision, feeding real demonstrations to enhance our Baseline Models. The result: robots that master delicate, high‑accuracy tasks, and handle objects of any shape, size, or rigidity.
Avsr Tele-op and Tele-presence (Patented)
Developed over 15+ years at SRI International, Avsr’s tele-op system is hardware-agnostic, scalable, and proven in high-stakes environments like pharma cleanrooms and bomb disposal. It won the won Int. Soc. for Pharma. Eng. RAYA 2024 award for Robotics.
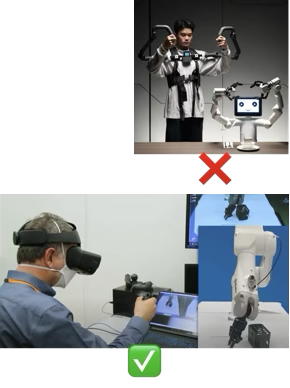
- Software-only control of any robotic hardware using low-cost VR controllers or hand-tracking—no replicas needed (e.g., Aloha). It supports single or dual-arm dexterity with fine joint control and translates complex human movements into optimized low-DoF robot motions.
- Ultra-low latency: 70ms on local networks (vs. 250ms for competitors); 300ms at over 5000km.
- Human-in-the-loop: Enables safe, secure operation in sensitive and trust-critical environments.
- Scalable & cost-effective: Easy to deploy across diverse hardware platforms.